2019-09-20 08:35:09
2019-09-20 08:35:09
来源:中科院之声
1985年,躯体失认症患者Sacks这样描述自己的症状:“一个人应该能够分辨自己的身体,分辨哪些为身体所属而哪些不是——但这条腿,这样东西… 它不对劲,它不是真实的——我感觉不到它的存在,我觉得它不属于我”。
躯体失认症是一种离奇的神经系统综合症,它的存在从侧面证明了人类感知自我身体的能力直接受到神经系统的制约,换句话说,正是神经系统本身——而绝非身体本身——决定了我们对于自己身体的感知力。
与躯体失认症截然相反的病症则是幻肢觉——在伤口痊愈后的很长一段时间里,80%以上的截肢者仍然可以感觉到自己失去的肢体。幻肢觉无时无刻不伴随着大部分意外失去肢体的人们,当残肢被触摸的时候,他们能够感受到失去的手臂或腿部正在受到压力;不论是在走路、坐下或是伸展四肢时都会觉得肢体仍然在正常运动。
究竟是什么使得肢体健在的人在意识上却对自己的身体“视若无睹”?又是什么使得因故失去肢体的人对自己“拥有肢体”这一执念如此之深?换句话说,我们的大脑依据什么来判定自我与非我的边界?“自我意识”对于神经系统而言到底意味着什么?——“我是谁”这一问题作为哲学三大命题之首早已于2005年在 Science 杂志周年庆典时被评为最重大的科学问题之一,自然地,这个“棘手”的问题也被神经科学家们不断地探索和提及。
“自我意识”的涵盖面复杂而广泛,但值得庆幸的是,总有那么一小撮研究者们敢于接住这烫手的山芋——比方说,以“身体拥有感”这一感知作为切入点,通过神经科学的手段来探索意识的本质和自我的边界。
橡皮手效应(Rubber Hand Illusion,RHI)指的是在特定的多感官条件下,我们将人造手或假手(Rubber Hand)误认为是自己的手的幻觉体验过程。举个例子,当自己真实的手和人造假手以相近的姿态放置,并同步地施加刺激(被动式),或以相同姿态同时运动(主动式)时,那么在真实手被掩蔽的情况下,我们就会自然而然地产生一种“模型假手好像是我的手”的奇妙错觉——对模型假手产生了拥有感。
认知心理学家们在1998年首次发现了这一神奇而稳定的现象,然而长久以来科学界却一直缺少一个身体拥有感和身体所有权错觉在神经系统层面上的合理解释。
那么,这种错觉在我们的脑中究竟是如何产生的呢?
2019年9月4日,《美国科学院院刊》在线发表了题为《猕猴自我身体编码的统计模型和神经元表征》的研究论文,该工作由中国科学院脑科学与智能技术卓越创新中心的王立平研究组完成。研究人员利用自主设计搭建的虚拟现实呈现系统,在猕猴和人类被试上建立身体幻觉行为学范式,并对其身体拥有感进行定量行为学测量和计算建模。更重要的是,研究人员通过电生理记录的方式,发现了猕猴大脑前运动皮层的群体神经元以贝叶斯因果推断的方式对身体拥有感进行编码。
对于研究手臂感知的实验来说,其中一个关键问题是,如何设计实验来测量被试对手臂的拥有感。虽然,对于人类被试,我们可以非常方便地要求他们口头汇报,但显然这种方式并不适用于动物。幸而,橡皮手错觉的实验告诉我们,当被试看到的假手和他的真手位置不一致时,被试对假手拥有感的强弱(错觉强弱)与他汇报的手臂位置往假手方向的偏移程度——本体感觉偏移——非常相关。利用这一点,研究人员巧妙地设计了一种目标点指向任务,要求猕猴和人类被试在自己的真手被遮挡的情况下,尽量准确的用自己的手指向目标点(图1中的红点)。同时,研究人员利用计算机处理,在视频上实时呈现被试的手臂画面。并且,为了产生不同程度的错觉效果,视频中的手臂画面与被试的真手会存在不同程度的偏差。如图1中所示,如果视频中的手顺时针偏转30°,由于错觉的存在,被试感觉到的手臂位置会往视频中假手的方向偏移,因此,他们指向的位置会偏向目标点的左侧。此时,目标点就代表了被试主观上感觉到的手臂位置,目标点与真手之间的偏差(本体感觉偏移)程度则代表了被试多大程度上觉得视频中的就像是自己的手。
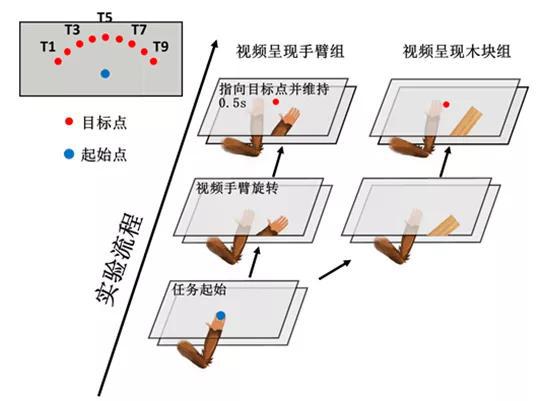 图1 人和猕猴实验设备和行为学任务示意图
图1 人和猕猴实验设备和行为学任务示意图从本体感觉偏移的测量结果可以看到,人类被试和猕猴都展现出了类似的行为模式。当视频手和真手偏差较小时,被试更偏向于相信看到的视觉手就是自己的手,此时本体感觉偏移由视觉信息主导;而当偏差逐渐增大时,被试越来越不相信看到的手是自己的手。人类被试的问卷也表明,被试此时失去了对视觉手臂的拥有感,被试受视觉信息的影响减小,这时的本体感觉偏移也就不再增大,甚至反而减小了。这项实验首次证实了猕猴也能产生与人类被试类似的橡皮手错觉。
那么,究竟是怎样的计算机制控制着这种身体错觉的产生呢?相信大家都听说过贝叶斯理论,如果我们的大脑接收到的各种信息之间存在冲突,那么大脑就需要根据各种信息的可靠性来推测真实的情况。将这个原理利用到身体感知中,便有了贝叶斯因果推断模型(Bayesian Casual Inference Model)。目前神经科学家们普遍认为,我们的对身体的主观体验并不是感觉信息的直接反映,而是大脑结合外部感觉信息和内部已经存在的经验共同建构出来的。在某些特定的条件下,比如精神分裂症中,当神经系统的感知整合不再受控,我们的主观体验也会随之偏离正轨。
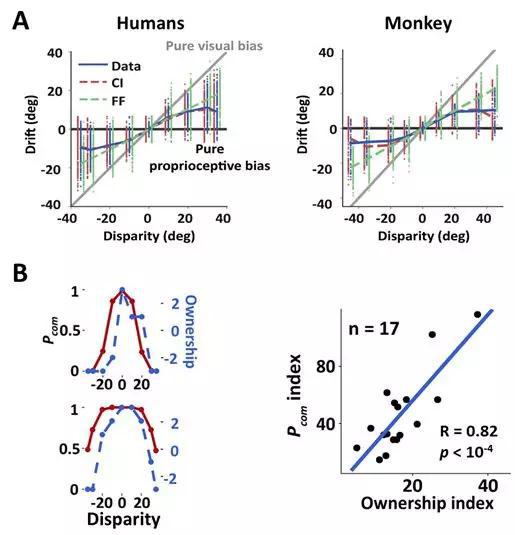 图2 行为学结果和模型拟合结果。A。 行为学结果以及两种模型(CI:贝叶斯因果推断模型,FF:最优整合模型)的拟合结果比较。B。 模型拟合的Pcom与人类被试的错觉打分非常类似。左侧图为两名典型被试,红色线为Pcom,蓝色线为错觉打分;右侧图为被试间的相关性。
图2 行为学结果和模型拟合结果。A。 行为学结果以及两种模型(CI:贝叶斯因果推断模型,FF:最优整合模型)的拟合结果比较。B。 模型拟合的Pcom与人类被试的错觉打分非常类似。左侧图为两名典型被试,红色线为Pcom,蓝色线为错觉打分;右侧图为被试间的相关性。而我们的大脑则类似于一架贝叶斯推断机,它能够整合根据经验得到的先验预期和当前感官接收到的信息来估计相关事件发生的概率(图3上)。
事实上,研究人员发现人和猕猴的行为结果确实符合贝叶斯因果推断模型的预测(图2A):当视频中的手和真手的空间位置越接近,大脑认为两种信息来自同一来源——都真实地反应了自己真手——的可能性(Pcom)就越高。此时,主观感觉到的手臂位置也就会更偏向视频中手臂的位置。同时,人类被试对视觉手拥有感的打分也越高(图2B)。统计结果也证实,视觉手拥有感打分(ownership)和模型拟合得到的Pcom间存在显著的相关性(图2B右)。
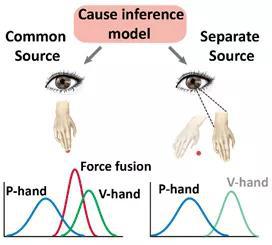 图3 贝叶斯因果推断模型
图3 贝叶斯因果推断模型更为重要的是,研究人员还发现猕猴前运动皮层中群体神经元的放电活动与行为学水平上的手臂错觉程度密切相关。无论在何种程度的偏转条件下,当错觉较强时,群体神经元的放电模式与偏转0°时(具有最强的错觉)的反应模式更相似(图4左,颜色越红越相似);而当错觉较弱时,其放电模式与偏转0°时反应模式的相似度也就越低(图4左,颜色越蓝越不相似)。
为了进一步验证这一发现,研究人员又将视频中的手臂画面替换成了一块尺寸相似的木块。根据贝叶斯因果推断模型的预测,当我们看到的物体的外观与真正的身体明显不一致时,大脑内已经存在的经验 (Prior)会告诉我们看到的物体不太可能是身体的一部分。因此对视觉木块的拥有感将显著降低。实验结果确实验证了这一预测,相比视觉手臂组,木块组中人和猕猴的本体感觉偏移显著降低。并且,木块条件下模型预测的视频上的手和真手来自“同一来源”的概率(Pcom)显著低于手臂组。这些结果也进一步证实了模型中的 Pcom与手臂拥有感的相关性。神经元的活动也显示,猕猴前运动皮层中群体神经元在木块条件下的放电反应与偏转0°时反应的相似度明显降低(图4右,整体颜色更蓝)。
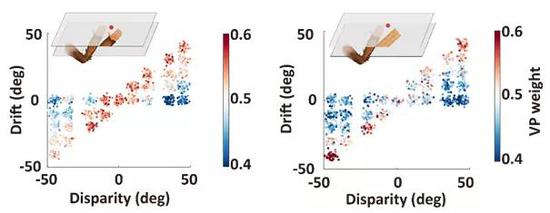 图4 前运动皮层群体神经元反应模式
图4 前运动皮层群体神经元反应模式综合这些结果,研究人员认为,我们大脑对自己身体的感知不仅依赖于外界感觉信息(视觉,本体感觉等)的输入,还会结合大脑内已经存在的经验信息,并以贝叶斯因果推断模型的方式组合这些来自不同层面的信息。其中的核心步骤,对“同一来源”这一概率的编码则主要与前运动皮层神经元的活动有关。
一直以来,由于缺乏可靠的方法改变动物对身体的感知并测量这种改变,我们对于自我身体感知背后的神经机制几乎一无所知。这项研究不仅为自我身体感知的理论模型提供了重要的行为学和电生理证据,更重要的是为进一步研究身体自我意识的神经机制提供了可客观测量的行为学任务和非人灵长类动物模型。这为将来真正理解自我意识,人工智能和脑机接口的研发以及精神疾病的治疗提供了重要的实验基础。
最后,让我们再回到最初的问题:自我意识真的遥不可及吗?那些看似抽象的哲学问题真的不能被研究吗?
也许从一开始,我们就问错了问题——可能更有意义的提问方式是,面对这个极端复杂而又奇妙的问题,我们可以做些什么来推动它的进展,我们能够创造出怎样的科学手段来改善长久以来的茫然无知的现状。我想最终的结果一定会是很多神经科学家们所梦寐以求的。